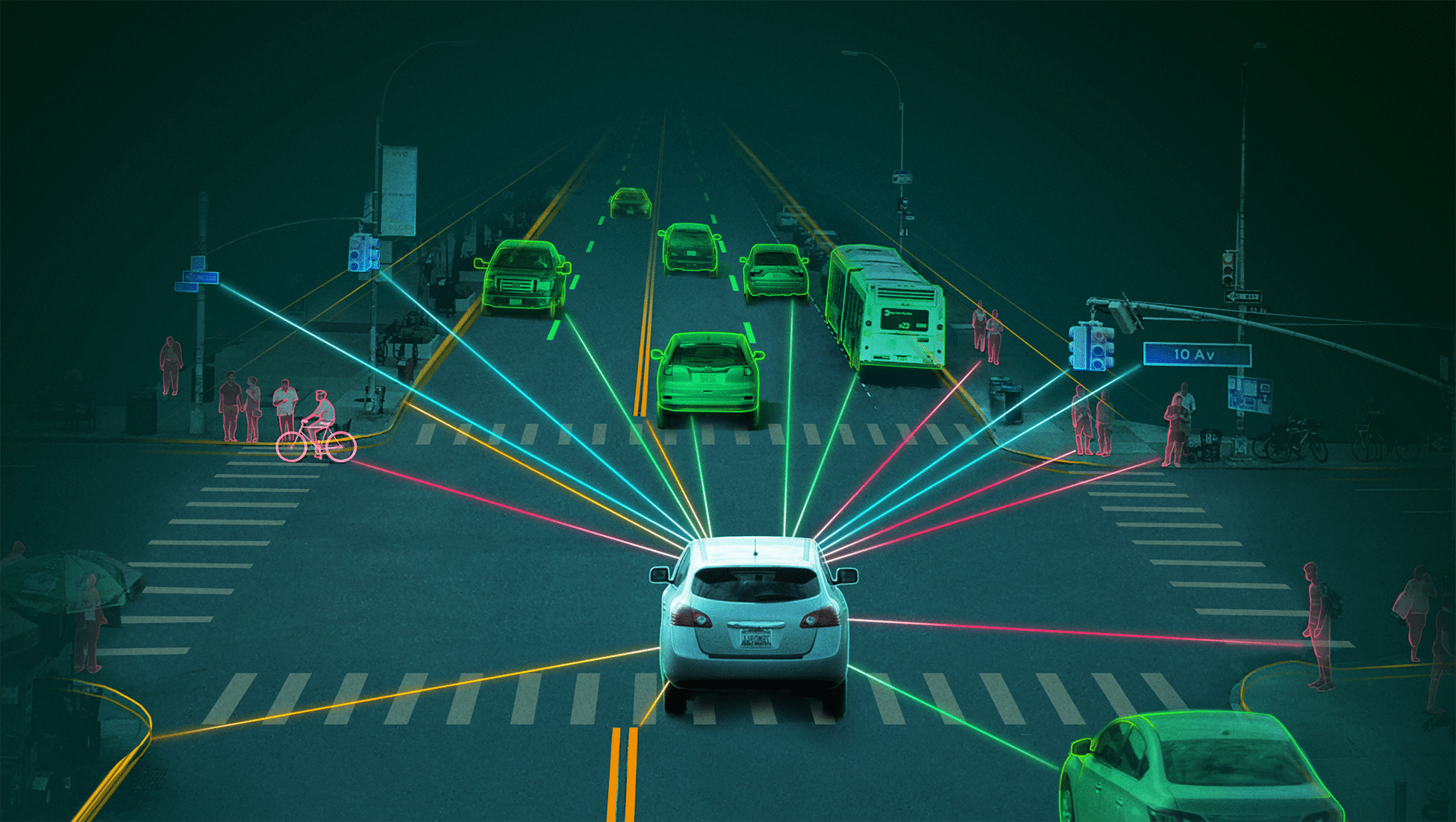
An innovative autonomous driving and detection system
Leveraging the power of semantic segmentation through the pretrained DeepLabV3 model, we have tailored our system to detect vehicles, pedestrians, and more.
- Semantic Segmentation Model
- Perception Module.
- Object Detection and Tracking.
- Trajectory Planning.
Features
Autonomous Driving
Self-driving capabilities based on detected objects and road conditions. Adaptive driving behavior to ensure safe and efficient navigation.
Vehicle Detection
Identifies vehicles of all kinds on the road while driving, Enhances lane detection while driving and vehicle tracking.
Pedestrian Detections
Identifies pedestrians near roads or crosswalks and Alerts system for potential pedestrian-vehicle interactions .
Interface
User-friendly dashboard displaying live feed from the vehicle's cameras and Interactive map showing the vehicle's route, detected objects, and driving decisions.
Output






Our Model
Our autonomous vehicle and pedestrian detection system has achieved an outstanding accuracy rate. This high level of accuracy is crucial for ensuring road safety and optimizing autonomous driving capabilities.
Accuracy
& error rate
96% accuracy translates to a 4% error rate, significantly reducing false positives/negatives and enhancing system reliability in real-world scenarios.
Methodology
Testing
Rigorous testing and validation process using Intersection over Union (IoU) metrics. Comprehensive dataset with diverse road conditions and scenarios for evaluation..
Advantages
Over Others
DeepLabV3 with ResNet-50 demonstrates superior performance with the highest accuracy and detection rate while maintaining a low false-positive rate.
Real-world Testing
Scenarios
Tested in various environments: urban roads, highways, low-light conditions, and adverse weather. Real-time processing demonstrated with minimal latency in dynamic traffic situations.
| Model | Accuracy (%) | Detection Rate (%) | False Positives (%) |
|---|---|---|---|
| DeepLabV3 + ResNet-50 | 96% | 98% | 2% |
| DeepLabV3 + ResNet-101 | 92% | 95% | 5% |
| MobileNet | 88% | 91% | 9% |
| U-Net | 90% | 93% | 7% |
| Custom Model | 93% | 96% | 4% |
Case Studies:
Urban Road Scenario:
DeepLabV3 + ResNet-50 accurately detects 98% of vehicles and pedestrians, reducing the risk of accidents by 50% compared to other models.
Highway Scenario:
Achieved 95% accuracy in high-speed detection with quick response time, ensuring safety during lane changes and merging.
Adverse Weather:
Maintained 92% accuracy in low-light conditions and 90% accuracy in adverse weather, showcasing robust performance in challenging scenarios.
Contribute to Our Project
We believe in the power of community collaboration. Feel free to explore our project on GitHub and contribute to its development.

